1 引言
以下是在人工智能领域中广泛讨论的一系列智能体(Agent)设计模式与架构方法。这些模式常见于智能体系统设计、多智能体系统(Multi-Agent Systems)以及自主决策框架之中。部分模式源于理论基础,另一些则来自知名实现方案与工程实践。
1. 反应式(反射型)智能体
简单反射智能体(Simple Reflex Agents)。此类智能体直接将感知(percepts)映射为动作,不维护内部环境模型。其行为完全基于当前输入,立即响应(例如:恒温器根据设定规则调节温度)。基于模型的反射智能体(Model-Based Reflex Agents)。智能体维护一个内部环境模型,用于处理部分可观测状态。它根据感知不断更新模型,从而在即时反应中融入对环境状态的理解,提升行为的适应性。 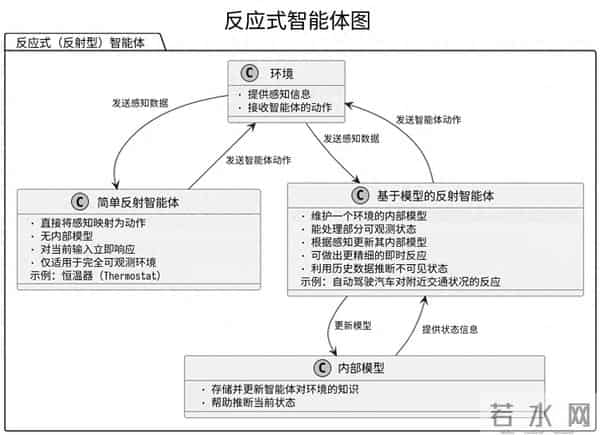
反应式(反射型)智能体
2. 目标驱动型智能体目标导向推理(Goal-Directed Reasoning)。智能体根据其目标评估各可行动作,选择最有助于达成目标的行动。该模式通常涉及搜索、规划及启发式评估,以判断哪些动作能更有效地推进目标实现。约束求解型智能体(Constraint-Solving Agents)。将环境状态与目标形式化为一组约束条件,并在满足所有约束的前提下寻找可行解。其决策过程聚焦于缩小搜索空间,快速定位合法的目标状态。3. 效用驱动型智能体决策理论型智能体(Decision-Theoretic Agents)。为每个可能结果分配效用值(或期望效用),并选择能最大化长期期望效用的动作。该模式广泛应用于经济建模与复杂决策任务。基于马尔可夫决策过程 / 强化学习的智能体(MDP/RL-Based Agents)。将交互过程建模为序列决策问题,采用 Q-learning、策略梯度(Policy Gradients)、值迭代(Value Iteration)等方法,以最大化累积奖励。4. 信念-愿望-意图(BDI)智能体认知架构(BDI 模型)。该模式借鉴理性主体的哲学基础,支持模块化推理与更贴近人类的决策机制。智能体显式维护三类核心要素:信念(Beliefs):关于世界状态的信息;愿望(Desires):长期目标或偏好;意图(Intentions):已承诺执行的行动计划。BDI 系统中的分层推理(Layered Reasoning in BDI Systems)。将高层抽象推理(如目标与信念管理)与底层动作执行分离。典型代表如 PRS(Procedural Reasoning System)框架。5. 混合架构分层架构(如 Touring Machines、InteRRaP)。同时包含反应层与推理层:反应层处理即时响应,而高层规划模块负责长期战略目标。这种设计兼顾实时性与复杂规划能力。三层架构(反应层、序列层、推理层)。常见于机器人与 AI 系统:底层:快速控制回路,处理紧急反应;中层:技能调度与行为序列管理;顶层:全局规划与目标设定。6. 多智能体交互模式合约网络协议(Contract Net Protocol)。一种去中心化的任务分配机制:任务发布者广播任务,其他智能体提交竞标,发布者择优委托。体现了基于市场的协作范式。协调者/促进者模式(Coordinator/Facilitator Patterns)。由特定智能体(或智能体组)负责协调其他成员,处理协商、资源分配或冲突调解。黑板架构(Blackboard Architectures)。多个专业化智能体通过共享数据结构(“黑板”)进行协作:任一智能体可读写黑板内容,通过发布局部解或中间结果触发其他智能体的后续行动。7. 自适应与自组织模式间接通信协调(Stigmergic Coordination)。智能体通过修改共享环境间接协调行为(例如:蚂蚁通过信息素路径引导同伴)。该模式广泛应用于群体智能与行为机器人学。进化型智能体群体(Evolutionary Agent Populations)。利用进化计算或遗传算法优化智能体行为,使群体在代际演化中持续适应环境变化。8. 面向服务与本体驱动的智能体模式面向智能体的软件工程框架(AOSE Frameworks)。采用 Gaia、Tropos 等方法论,明确定义智能体的角色、交互协议与组织规则,指导系统化智能体开发。本体驱动型智能体(Ontology-Driven Agents)。依赖共享的语义词汇表(本体)进行通信与协作,提升知识互操作性与模块化组合能力。 上述模式构成了一套概念工具箱,可用于设计、分析和实现各类智能体及多智能体系统。实践中,设计者常融合多种模式——例如,在反应式框架之上叠加 BDI 推理机制,或将效用驱动决策嵌入多智能体协商协议——以应对复杂、动态的真实世界环境。





